
Этот термин часто используют для того, чтобы отделить подобные аппараты от субмарин. Однако в общем использовании словосочетание «подводная лодка» может применяться для описания корабля, который по техническому определению фактически является подводным аппаратом.
Существует много типов такого оборудования, включая как самодельные, так и промышленно созданные суда, которые иначе известны как машины с дистанционным управлением или ROV. Они имеют множество применений во всем мире, особенно в таких областях, как океанография, подводная археология, исследования океана, туризм, техническое обслуживание и восстановление оборудования, а также подводная видеосъемка.
 Вам будет интересно:Петр Федорович Каптерев: биография, семья, карьера, труды, вклад в педагогическую науку и дата смерти
Вам будет интересно:Петр Федорович Каптерев: биография, семья, карьера, труды, вклад в педагогическую науку и дата смерти
История
Первое подводное судно было спроектировано и построено американским изобретателем Дэвидом Бушнелем в 1775 году в качестве средства для ввода взрывных зарядов на вражеские корабли во время американской войны за независимость. Устройство, получившее название «Черепаха Бушнелла», было овальным сосудом из дерева и меди. В нем устроены резервуары, заполненные водой (для погружения), а затем их опорожняли с помощью ручного насоса, чтобы всплыть на поверхность. Оператор использовал два гребных винта с рукояткой для перемещения по вертикали или сбоку под водой. У аппарата были маленькие стеклянные окна сверху и люминесцентная древесина, прикрепленная к корпусу, чтобы им можно было управлять в темноте.
 Вам будет интересно:Петр Федорович Каптерев: биография, семья, карьера, труды, вклад в педагогическую науку и дата смерти
Вам будет интересно:Петр Федорович Каптерев: биография, семья, карьера, труды, вклад в педагогическую науку и дата смерти

"Черепаха Бушнелла" была впервые введена в эксплуатацию 7 сентября 1776 года в гавани Нью-Йорка, чтобы напасть на британский флагман HMS Eagle. В то время сержант Эзра Ли управлял этим подводным аппаратом. Ли успешно подвел "Черепаху" к нижней части корпуса "Орла", но не смог установить заряд из-за сильных течений воды. Однако на этом история данных видов транспорта не закончилась.
Характеристики
 Вам будет интересно:Театральные вузы СПб: список, адреса, специальности
Вам будет интересно:Театральные вузы СПб: список, адреса, специальности
Помимо размера основное техническое различие между подводным аппаратом и субмариной заключается в том, что первый не является полностью автономным и может полагаться на вспомогательный объект или судно для пополнения топлива и дыхательных газов. Некоторые аппараты работают на «тросе» или «пуповине», оставаясь связанными с тендером (субмарина, надводный корабль или платформа). Они, как правило, имеют меньший радиус действия и работают в основном под водой, поскольку большинство бесполезно на поверхности. Подводные лодки (аппараты) способны погрузиться на глубину более 10 км (6 миль) ниже поверхности воды.
Субмарины могут быть относительно небольшими, содержать только небольшую команду и не иметь жилых помещений. Они часто имеют очень ловкую конструкцию, снабженную винтами пропеллера или насосами.
Технологии
Существует пять основных технологий, используемых при проектировании подводных аппаратов. Однополярные аппараты имеют корпус под завышенным давлением, а их пассажиры при этом находятся под нормальным атмосферным давлением. Они с легкостью выдерживают высокое давление воды, которое во много раз превышает внутреннее.

Другая технология, называемая давлением окружающей среды, поддерживает одинаковую нагрузку как внутри, так и снаружи сосуда. Это уменьшает давление, которое должен выдерживать корпус.
Третья технология - это «мокрая субмарина». Под термином подразумевается транспортное средство с затапливаемой внутренней частью. Как в водной, так и в атмосферной среде нет необходимости использовать оборудование SCUBA, пассажиры могут нормально дышать, не надевая ни одно дополнительное устройство.
Рекорды
За счет тросового вытяжения подводные аппараты могут погружаться на большие глубины. Батискаф "Триест" был первым достигшим самой глубокой части океана (почти на 11 км (7 миль) ниже поверхности) на дне Марианской впадины в 1960 году.
 Вам будет интересно:Физические свойства материалов: описание понятия, методы определения, суть материаловедения
Вам будет интересно:Физические свойства материалов: описание понятия, методы определения, суть материаловедения
Китай с его проектом Цзяолун в 2002 году был пятой страной, которая отправила человека на 3500 метров ниже уровня моря, следуя за США, Францией, Россией и Японией. Утром 22 июня 2012 года погрузочно-разгрузочный комплекс Цзяолун установил рекорд глубокого погружения, когда три человека спустились на 22 844 фута (6 963 метра) в Тихий океан.
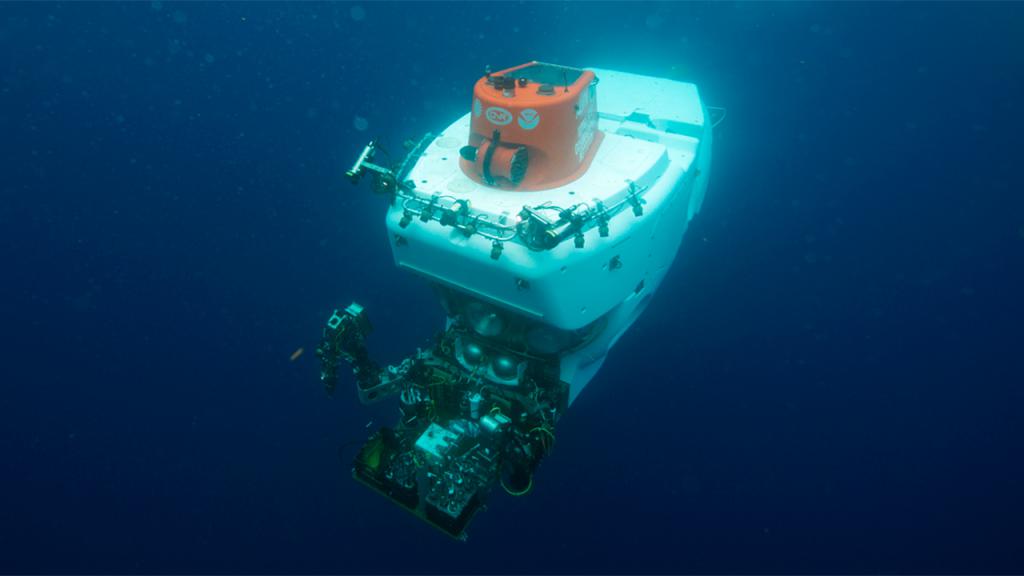
Среди наиболее известных и самых длинных в эксплуатации подводных аппаратов - глубоководный исследовательский корабль DSV Alvin, который укомплектован 3 людьми и способен погружаться на глубину до 4500 метров (14 800 футов). Он принадлежит флоту Соединенных Штатов, управляется системой WHOI и с 2011 года совершил более 4 400 погружений.
Джеймс Кэмерон сделал рекордное погружение на дно Глубины Челленджера, самой глубокой известной точки Марианской впадины, 26 марта 2012 года. Подводный корабль Кэмерона назывался Deepsea Challenger и достиг глубины 10 908 метров (35,787 фута).
Последние новинки
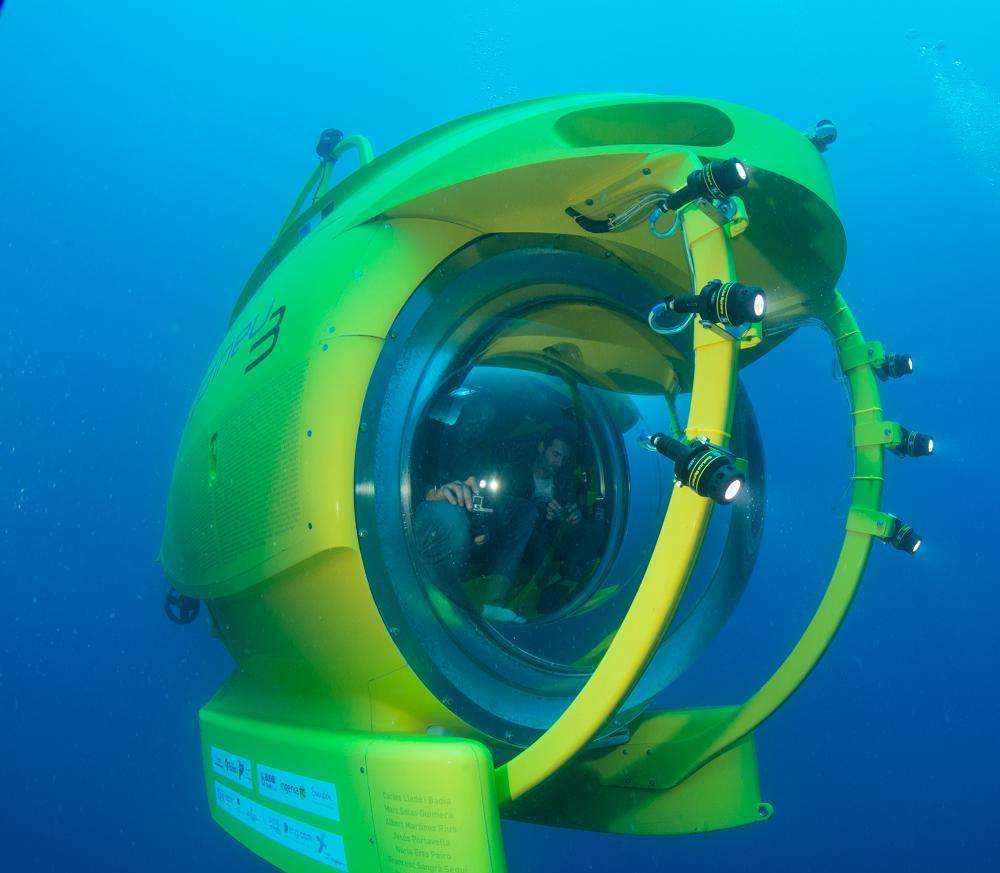
Совсем недавно частные фирмы Флориды выпустили серию аппаратов Triton Submarines. SEAmagine Hydrospace, Sub Aviator Systems (или SAS) и Нидерландская фирма Worx разработали небольшие подводные лодки для туризма и разведки.
Канадская компания, которая называется Sportsub, с 1986 года строит персональные рекреационные подводные лодки с конструкциями открытого пола (частично затопленные кокпиты).
Функциональные виды
Небольшие беспилотные подводные аппараты, называемые «морские дистанционно управляемые транспортные средства», или MROV, широко используются сегодня для работы в слишком глубокой или слишком опасной для ныряльщиков воде.
Такие аппараты помогают ремонтировать морские нефтяные платформы и прикреплять кабели к затонувшим кораблям, чтобы поднять их. Такие дистанционно управляемые транспортные средства прикреплены тросом (толстым кабелем, обеспечивающим питание и связь) с центром управления на судне. Операторы на корабле наблюдают видеоизображения, отправленные обратно от робота, и могут управлять пропеллерами и манипулятором аппарата. Затопленный «Титаник» был изучен именно таким транспортным средством.
Батискафы
Батискаф - это самоходный глубоководный погружной подводный корабль, состоящий из кабины экипажа, подобно батисфере, но подвешенный ниже поплавка, а не за поверхностный кабель, как в классическом дизайне батисферы. Многие рассматривают его как вид самоходного подводного аппарата.
Его поплавок заполнен бензином, легко доступен, плавуч и весьма прочен. Несжимаемость топлива означает, что цистерны могут быть очень легко сконструированы, поскольку давление внутри и снаружи резервуаров уравновешивается. Также емкости не имеют задачи полностью выдерживать любые перепады давления, тогда как кабина экипажа призвана оказать сопротивление огромной нагрузке. Плавучесть на поверхности можно легко уменьшить, заменив бензин водой, которая плотнее.
Этимология
Огюст Пикард, изобретатель первого батискафа, сочинил название «батискаф», используя древнегреческие слова βαθύς bathys («глубокое») и σκάφος skaphos («судно» / «корабль»).
Функционирование
Чтобы спуститься, батискаф затапливает воздушные резервуары морской водой. Но в отличие от подводной лодки, жидкость в его затопленных емкостях не может быть смещена со сжатым воздухом, чтобы подняться. Это связано с тем, что давление воды на глубинах, для которых корабль был предназначен для работы, слишком велико.
Например, нагрузка в нижней части Challenger Deep - аппарата, на котором плавал сам Джеймс Кэмерон - более чем в семь раз превышает давление в стандартном цилиндре сжатого газа типа H. Для равновесия этот аппарат использовал железные грузы. Контейнеры с ними состоят из одного или нескольких цилиндров, которые открыты на дне на протяжении всего погружения, а груз удерживается на месте электромагнитом. Это отказоустойчивое устройство, так как оно не требует повышения мощности.

История батискафов
Первый батискаф был назван FNRS-2 - в честь Национального фонда рекреационных исследований - и был построен в Бельгии с 1946 по 1948 год Огюстом Пикардом. FNRS-1 был воздушным шаром, используемым для подъема Пикарда в стратосферу в 1938 году.
Движение первого батискафа было обеспечено электродвигателями с батарейным питанием. Поплавок составил 37 850 литров авиационного бензина. В нем не было туннеля доступа. Сфера должна была быть загружена и выгружена на палубе. Первые плавания подробно описаны в книге Жака Кусто «Тихий мир». Как говорится в повествовании, «судно безмятежно выдержало давление глубин, но было уничтожено незначительным шквалом». FNRS-3 был новым подводным аппаратом, использующим экипажную сферу от поврежденного FNRS-2 и новый, более крупный, 75,700-литровый поплавок.
Второй батискаф Piccard был куплен ВМС США у Италии в 1957 году. В нем было два груза с водяным балластом и одиннадцать резервуаров плавучести, содержащих 120 000 литров бензина. Позже был изобретен подводный аппарат "Посейдон".
В 1960 году батискаф, несущий сына Пикара Жака и лейтенанта Дона Уолша, достиг самого глубокого известного места на поверхности Земли - Глубины Челленджера в Марианской впадине. Бортовые системы указали глубину 37 800 футов (11 521 м), но впоследствии она была исправлена до 35 813 футов (10 916 м) с учетом изменений, вызванных соленостью и температурой.
Аппарат был оснащен мощным источником энергии, который, осветив маленькую рыбу, подобную камбале, поставил вопрос о том, существовала ли жизнь на такой глубине в полном отсутствии света. Экипаж батискафа отметил, что дно состояло из диатомового ила и сообщал о наблюдении какого-то типа камбалы, напоминающего подошву, длиной около 1 фута и 6 дюймов в поперечнике, лежащей на морском дне.
В 1995 году японцы отправили автономный подводный аппарат на эту же глубину, но позже он был потерян в море. В 2009 году команда из Океанографического института Вудс-Хоул отправила роботизированную подводную лодку по имени "Нереус" на дно впадины.

Изобретение батисферы
Батисфера (от греческого βαθύς, бана, «глубокая» и σφαῖρα, сфайра, «сфера») была уникальной сферической глубоководной подводной лодкой, которая управлялась дистанционно и опускалась в океан на тросе. Она использовалась для проведения серии погружений у берегов Бермудских островов с 1930 по 1934 год.
Батисфера была спроектирована в 1928 и 1929 годах американским инженером Отисом Бартоном и стала известна благодаря тому, что натуралист Уильям Биб использовал ее для изучения подводной дикой природы. По своему строению батисфера близка к торпедному подводному аппарату.